
몸 우에 있는 로보트의 팔로 환자의 피부 아래에 있는 내시경을 원하는 방향으로 이동시킬 수 있다. 환자의 피부를 사이에 두고도 강한 자력으로 서로 달라붙기 때문이다. 탁자 밑에 놓은 자석이 탁자 우에 놓여진 쇠못을 옮기는 것과 같은 단순한 원리를 활용해 만든 이 로보트는 환자의 몸속 깊은 곳에서 수술하는 의사의 시야를 밝혀준다.
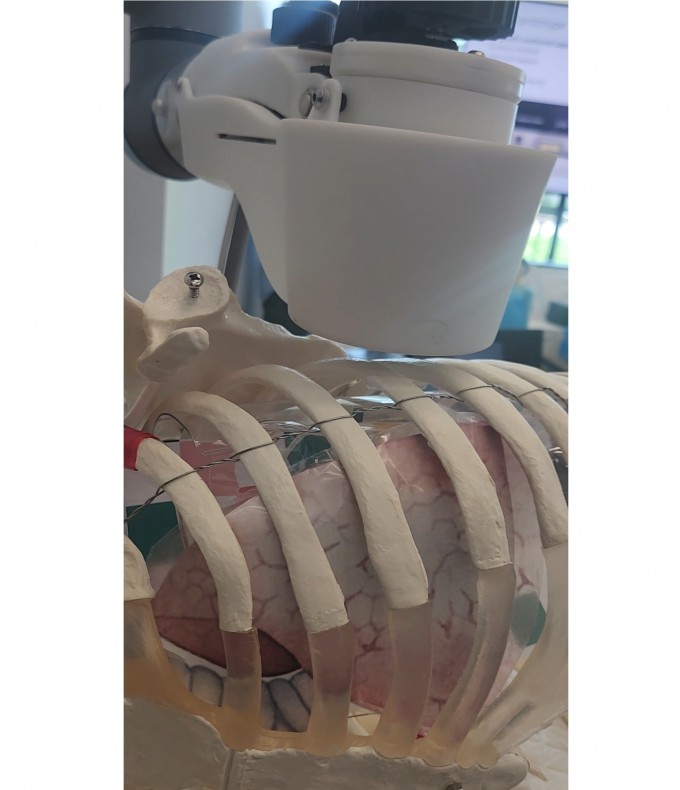
7일, 향항중문대학교 의료용로보트중심의 필립 츄 교수은 연구팀을 이끌고 만들어낸 로보트 ‘맥스’를 소개했다. 이 로보트는 자석의 힘을 리용해 환자의 몸밖에서도 몸속에 삽입된 내시경을 자유자재로 움직일 수 있다.
기존의 복강경은 크기가 커서 환자의 체내에서 너무 많은 공간을 차지한다는 문제가 있었다. 다른 수술용 도구의 삽입을 저애하거나 너무 좁은 신체부위에는 삽입 자체가 불가능했다. 연구팀은 기존 복강경의 여러가지 문제점을 극복했다.
‘맥스’의 경우 내시경을 움직이기 위한 장치인 ‘로보트 팔’이 환자의 몸밖에서 작동한다. 환자 몸속에 삽입해야 하는 장비의 규모가 복강경의 절반 수준인 것이다. 작은 크기의 내시경 장비인 맥스는 갈비뼈로 가로막혀 복강경 삽입이 어려운 몸속 구석구석을 탐험할 수 있다. 의사의 더 섬세한 관찰이 가능해진 것은 물론이고 내시경 삽입을 위해 절개해야 하는 면적도 줄어든다는 장점이 있다. 절개 면적이 줄어든 만큼 환자의 수술 후 회복 속도도 더 빨라지게 된다.
향항중문대학교 의료용로보트중심에서는 더 작고 능률적인 내시경 로보트를 개발하기 위한 프로젝트가 여럿 이루어지고 있다. 다른 야심작인 ‘MGE’란 이름의 로보트는 작은 크기를 가지면서도 내시경을 장착한 채 소장을 아주 빠른 속도로 횡단한다. 이 로보트 또한‘맥스’처럼 자력의 힘을 사용한다. 자력의 반작용으로 일어나는 회전 운동을 통해 강한 추진력을 확보한 것이다. 향후 체내미생물을 채집하는 기능까지 장착할 예정이다.
필립 츄 교수는 “소화기능의 대부분이 일어나는 소장은 생리적 기능 뿐만 아니라 체내미생물 생태계를 조사하는 데도 중요하지만 비침습적 방법으로 안을 들여다보는 것이 매우 어려웠다.”고 하면서 자력과 회전운동의 힘을 동시에 사용하는 MGE는 소장 속을 들여다볼 수 있는 차세대 로보트가 될 것으로 기대했다.
환자의 몸속 깊은 곳에서 의사의 눈과 팔이 되고 있는 의료용 로보트의 발전은 더 좋은 수술 결과로 이어지게 된다. 가까운 미래에는 인공지능(AI) 기술을 활용해 더 주도적으로 움직이는 로보트들이 의료현장에서 활약할 것으로 보인다. 외신
- 많이 본 기사
- 종합
- 스포츠
- 경제
- 사회
